Содержание
- 1 Русский
- 1.1 Морфологические и синтаксические свойства
- 1.2 Произношение
- 1.3 Семантические свойства
- 1.3.1 Значение
- 1.3.2 Синонимы
- 1.3.3 Антонимы
- 1.3.4 Гиперонимы
- 1.3.5 Гипонимы
- 1.4 Родственные слова
- 1.5 Этимология
- 1.6 Фразеологизмы и устойчивые сочетания
- 1.7 Перевод
- 1.8 Библиография
Русский[править]
Морфологические и синтаксические свойства[править]
| падеж | ед. ч. | мн. ч. |
|---|---|---|
| Им. | ко́птер | ко́птеры |
| Р. | ко́птера | ко́птеров |
| Д. | ко́птеру | ко́птерам |
| В. | ко́птер | ко́птеры |
| Тв. | ко́птером | ко́птерами |
| Пр. | ко́птере | ко́птерах |
ко́птер
Существительное, неодушевлённое, мужской род, 2-е склонение (тип склонения 1a по классификации А. А. Зализняка).
Корень: -коптер-.
Произношение[править]
- МФА: [ˈkoptɛr]
Семантические свойства[править]
Значение[править]
- летательный аппарат с несущими винтами ◆ Камнем упала вниз — на три этажа сразу — и только здесь позволила гироскопам стабилизировать коптер. Уильям Гибсон, «Периферийные устройства»
Синонимы[править]
Антонимы[править]
Гиперонимы[править]
Гипонимы[править]
- квадрокоптер, гексакоптер, мультикоптер, циклокоптер
Родственные слова[править]
| Ближайшее родство | |
Этимология[править]
От ??
Фразеологизмы и устойчивые сочетания[править]
Перевод[править]
| Список переводов | |
Библиография[править]
|
|
Для улучшения этой статьи желательно:
|
Масло масляное или коптер?
Сейчас в средствах массовой информации часто звучит слово «коптер».
Что оно означает и как оно произошло?
Коптер (англ. «helicopter») — сокращение, переводится как вертолет. Используется либо по прямому назначению, либо как обозначение беспилотного летательного аппарата с n-ым количеством несущих винтов.
Устаревшее название вертолёта — «геликоптер» — было заимствовано из французского языка (фр. hélicoptère) уже в конце XIX века. Во французском языке, в свою очередь, слово было создано из корней древнегреческого языка (др.-греч. ἕλιξ, родительный падеж ἕλικος «спираль, винт» и πτερόν «крыло»).
Правомерно ли забирать часть винта у крыла? Почему при сокращении не называют этот аппарат просто «птером»? Ведь «ко» из этого слова просто часть корня, причем ничего не означающая сама по себе. Ведь не называем мы домохозяйку — «мохозяйкой», мышеловку — «шеловкой».
Дело в том, что слово «коптер» пришло в русский язык уже сокращенным, а не видоизменялось по правилам русского языка.
Так и бутерброд (от нем. Butterbrot «хлеб с маслом», из Butter «масло» + Brot «хлеб»» пришел к нам уже готовым словом, что привело к созданию масла масляного.

Словарь терминов. Что такое квадрокоптер?
Квадрокоптер — беспилотный летательный аппарат с 4 пропеллерами, что обычно размещаются по краям коптера. Русское название «квадрокоптер» — калька с английского «quadcopter«, что переводиться как 4-роторный вертолет. Примеры квадрокоптеров: DJI Inspire 1, Phantom 2 Vision Plus.
Мультикоптер — общее название для беспилотных летательных аппаратов, у которых количество пропеллеров (несущих винтов) больше, чем 2. Образовано от слов «multi» (несколько) и «copter» (вертолет).
Гексакоптер — беспилотный летательный аппарат с 6 пропеллерами, что обычно размещаются по краям коптера. Название произошло от слов «hexa» («гекса«, с древнегреческого — «шесть«) и «copter«. Пример гексакоптеров: DJI Flame Wheel ARF KIT, DJI S900.
Октокоптер — беспилотный летательный аппарат с 8 пропеллерами, что обычно размещаются по краям коптера. Название произошло от слов «
octo» («окто«, с латыни — «восемь«) и «copter». Примеры октокоптеров: DJI S1000, DJI S1000+.
Коптер — сокращение от слова «helicopter«, вертолет. Используется либо по прямому назначению, либо как обозначение беспилотного летательного аппарата с n-ым количеством несущих винтов.
Дрон — беспилотный летательный аппарат. Часто это название применяется для обозначения квадрокоптеров и других мультикоптеров, что является ошибкой, поскольку дроном называются беспилотники военного назначения, внешний вид которых существенно отличается от коптеров.
Ready-to-Fly — собирательное название для мульткоптеров, что не требуют сборки. Дословно это выражение можно перевести как «готовый к полету». Как правило, для первого полета таких мультикоптеров нужно лишь зарядить аккумуляторную батарею и, в некоторых случаях, откалибровать компас.
У компании DJI Innovations есть две серии таких квадрокоптеров (Inspire и Phantom).
Flying Platform (дословно «Летающая платформа») — собирательное название для мультикоптеров, в базовом комплекте с которыми идет лишь корпус с лучами, моторы, крепления и комплект проводов. Чтоб этот коптер взлетел, к нему нужно докупать дополнительные аксессуары.
Луч — вытянутая «рука» коптера что отходит от центральной платформы. Именно на лучах крепятся пропеллеры.
Карданная подвеска/(моторизованный) шарнир — крепление и одновременно стабилизатор для камеры, что крепиться к коптеру снизу.
Центральная платформа — основа коптера, его база. К ней крепятся все остальные части: лучи, крепление для камеры, передатчики и прочее.
FPV-камера — камера, что передает видео в режиме онлайн, но которая не предназначена для записи видео. Расшифровывается как «камера от первого лица» или «камера, что позволяет смотреть от первого лица».
Вконтакте
Google+
Одноклассники
LiveJournal
Понравилось? Поделитесь с друзьями, нам будет очень приятно 🙂
quadrocoptery.ru
Почему квадрОкоптер, а не квадрАкоптер? В интернете встречаю только через «о», но и «дельтОплан» тоже встречался нередко
Я постоянно твержу: Интернет не эталон грамотности, скорее, наоборот. Пишут здесь разные люди, с разным уровнем образования, потому и ориентироваться на статьи Интернета в написании слов нельзя. Вам, как я поняла, не понравилось, что пишется не саентология, как Вы часто видите в Интернете, а сайентология. И это уже норма, зафиксированная словарями, что я Вам и показала на скриншотах в ответе на Ваш вопрос https://otvet.mail.ru/question/187065206, но Вы почему-то никак не хотите принять за истину положение о том, что лучший друг корректора – словарь, а не Интернет, благо, что в Сети сейчас масса онлайн-словарей известных авторов: Ожегова, Ефремовой, Кузнецова, Зализняка, орфографический РАН и пр. (а ещё корректор должен отлично знать теорию языка, ибо без этого знания никак не разобраться во многих сложных вопросах орфографии, пунктуации и других разделов лингвистики).
Вот и со словами ДЕЛЬТАПЛАН и КВАДРОКОПТЁР надо обращаться к словарям, а не смотреть, как их употребляют пользователи.
А словари говорят: есть сложные слова, первая часть которых ДЕЛЬТА (по названию греческой буквы). А так как название буквы склоняется (дельту, дельтой), то при образовании сложных слов – ДЕЛЬТАПЛАН, ДЕЛЬТАКЛУБ, ДЕЛЬТАДРОМ – флексия превращается в интерфикс, ЧАСТЬ СЛОВА, НАХОДЯЩУЮСЯ МЕЖДУ ДВУМЯ КОРНЯМИ (соединительные гласные О и Е в сложных словах – разновидность интерфикса). В простых (несложных) словах интерфиксы тоже встречаются – между морфемами, но не о них сейчас речь.
Слово КВАДРОКО́ПТЕР ещё настолько новое в русском языке, что пока фиксируется лишь словарём Зализняка, но объяснить выбор гласной О можно и с помощью других словарей.
А словари говорят, что КВАДРО- [от лат. quadri- – четырёх] – первая часть сложных слов. Сначала эта часть употреблялась для обозначает отнесённости чего-либо к записи и воспроизведению звуков по ЧЕТЫРЁМ каналам стереофонической системы. Отсюда и пошли слова КВАДРОСИСТЕМА, КВАДРОЗВУК, КВАДРОЗАПИСЬ.
Позже эта часть КВАДРО- появилась и в слове, со звукозаписью не связанном, но в значении которого латинское ЧЕТЫРЕ играет существенную роль. Это слово КВАДРОЦИКЛ – вид мотоцикла, но с четырьмя колёсами. А совсем недавно появилось и слово КВАДРОКО́ПТЕР, значение которого прекрасно объясняется в зафиксированном Национальным корпусом русского языка предложении:
«Так, заглянув на популярный западный сайт thingiverse.com, я обнаружил, например, комплектующие части портативного квадрокоптера – самостабилизирующегося вертолёта с четырьмя роторами, гораздо более устойчивого, чем обычный вертолет». (Александр Волков, «Третья промышленная революция»).
ПЕНТА- [< греч. pente пять] – первая составная часть сложных слов, соответствующая по значению слову пять: ПЕНТАХОРД, ПЕНТАГРАММА.
Так что механизм, образующий сложные слова с первой частью ДЕЛЬТА-, ПЕНТА- и КВАДРО-, в русском языке же выработан, потому и те слова, которые появятся в языке спустя время, тоже будут писаться с А, если их первая часть ДЕЛЬТА- или ПЕНТА-, и с О, если их первая часть КВАДРО-.
Квадроциклы и квадрокоптеры так стремительно входят в нашу жизнь, что, думаю, скоро, кроме словаря Зализняка, будут фиксироваться и другими словарями, исключая, конечно словарь Ожегова, ибо жадность его наследников остановила многолетнюю работу Шведовой по «осовремениванию» этого словаря, который без её вмешательства уже превращается в такой же анахронизм, как словарь Даля или словарь Ушакова.
А ПЕНТО́Д – слово сложносокращённое, в словаре это показано: пент (а) + (электр) од.
otvet.mail.ru
Квадрокоптер Википедия

Мультикоптер (англ. Multirotor, multicopter, многороторный вертолёт, многолёт) — это летательный аппарат построенный по вертолётной схеме с тремя и более несущими винтами[1].
История
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолёт), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году. Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение рулевого винта и автомата перекоса положило конец этим попыткам. Новые разработки начались в 1950-е годы, но дальше прототипов дело не продвинулось.
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании[2]. Мультикоптеры удобны для недорогой аэрофото- и киносъёмки — громоздкая камера вынесена из зоны действия винтов[источник не указан 149 дней].
-
Самолёт Curtiss-Wright X-19 использует при взлёте и посадке принцип квадрокоптера
-
Модель транспортного средства-гексакоптера
-
Октокоптер для персональных полётов
Принцип действия
По принципу управления мультикоптеры бывают[3]:
- автономные
- дистанционно-управляемые (беспилотные)
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
- ускорить все винты — подъём;
- ускорить винты с одной стороны и замедлить с другой — движение в сторону;
- ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против — поворот.
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также, применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий. И самое главное — GPS-приемник, позволяющий записывать маршрут полёта заранее, с компьютера, а также, возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом
[4].
Существуют также трёх- и пятивинтовые вертолёты (три- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом — так и осуществляется поворот аппарата вокруг своей оси[5]. Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.
По вариантам размещения винтов в отношении оси движения и в зависимости от их направления вращения различают несколько типов мультикоптеров:
Современное применение мультикоптеров
Современное применение мультикоптеров весьма разнообразно, от игрушек и любительских средств для фото- видеосъёмок, контрабанды товаров, до пассажирских и грузовых транспортных средств, боевых роботов[6][7][8][9].
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии
[10]. Винты могут быть установлены непосредственно на вал двигателя, либо через редуктор.
Это накладывает определённые ограничения на их полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30—50 минут у уникальных единичных экземпляров). Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности — от 500 г до 2—3 кг, что позволяет поднять в воздух небольшую фото или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных). Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6-8 (гекса и октокоптеры), способные поднять в воздух груз массой до 20-30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах. Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100—110 км/ч. Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7-12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100—200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее. Для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10—15 км при высоте полёта 1—2 км.
-
Миниатюрный квадракоптер передающий изображение со встроенной камеры на смартфон по Wi-Fi
-
Миниатюрный квадракоптер, с пультом упраления с возможностью установки планшета как приёмника видеосигнала
-
Квадрокоптер для профессиональных фотосъёмок с креплениями для цифровых фотоаппаратов
-
Квадрокоптер визуального контроля окружающего пространства для силовых структур «Грифон-41»
-
Экспериментальный квадрокоптер «Ehang 184»
-
Прототип волокоптера «2X»
Безопасность полётов
В отличие от самолёта, который способен планировать с выключенным двигателем, или вертолёта, который способен сесть с помощью авторотации, мультикоптер при отключении моторов или электропитания, полностью неуправляем. Квадрокоптер при отказе одного из двигателей может сохранять стабилизацию. Гексакоптер или октокоптер помимо этого могут совершить мягкую посадку с одним неработающим мотором, однако не во всех случаях (например, при разрыве хотя бы одной лопасти вибрация из-за дисбаланса увеличивается настолько, что контроллер перестаёт работать, и аппарат переходит в неуправляемое падение). Но уже существуют экспериментальные квадрокоптеры, которые могут стабилизировать полёт и совершить посадку при потере одного из двигателей[11].
Учитывая то, что мультикоптер имеет немалую массу, жёсткий корпус и быстро вращающиеся пропеллеры, его столкновение с людьми или автотранспортом может привести к негативным последствиям. Поэтому полёты над людьми или автодорогами не рекомендуются. Желательно планировать траекторию полёта так, чтобы в случае необходимости (например, при разрядке батареи) внизу было место для безопасной посадки.
Важен и человеческий фактор. Современный полётный контроллер по сложности настройки и количеству полётных режимов почти не уступает настольному компьютеру. Невнимательное чтение документации, отсутствие выполнения необходимых действий (например, калибровки компаса при настройке) могут привести к неуправляемому полёту и потере аппарата. Вылет аппарата за радиус действия пульта при отсутствии режима GPS-возврата также является одной из причин потерь аппаратов.
В целях безопасности некоторые модели дистанционно управляемых мультикоптеров оборудуют дублирующими системами навигации и позиционирования, элементами интеллектуальной роботизации способствующими самостоятельному определению летательным аппаратом препятствии на маршруте полёта и их облёту, защитными кожухами винтов или всего летательного аппарата, самостоятельным возвратом к месту пуска при утере сигнала управления[12][13][7][10].
Мультикоптеры-игрушки
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата около 40 г), в то же время, позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам.
-
Миниквадрокоптер с зарядкой через USB
-
Квадрокоптер «Robbe Blue Arrow Nano Loop»
-
Миниквадрокоптер с пультом управления
-
Октокоптер в полёте
-
Квадрокоптер Parrot AR.Drone 2.0 с управлением по Wi-Fi при помощи смартфонов/планшетов вместо пульта упраления
См. также
Примечания
Литература
- Яценков В. С. Электроника. Твой первый квадрокоптер. Теория и практика // СПб.: БХВ-Петербург. — 2017. — 256 с. ISBN 978-5-9775-3586-1.
Ссылки
wikiredia.ru
Отличия и сходства понятий дрон, БПЛА и квадрокоптер
В средствах массовой информации на профильных сайтах или просто в разговоре можно нередко встретить такие термины, как “БПЛА” (жаргонное: беспилотник), “дрон”, “квадрокоптер“. Причем, часто эти слова используются как синонимы.
Можно ли использовать эти термины в качестве синонимов? Чем похожи БПЛА, квадролеты и дроны? Этот ликбез поможет ответить на данные вопросы.
Краткие определения для нетерпеливых:
- Дрон – любой беспилотный аппарат. То есть аппарат без экипажа на борту. Дрон не обязательно летает. Например, танк без экипажа тоже будет называться дроном.
- БПЛА – это то же самое, что и дрон, но аппарат обязательно летательный. На это указывает расшифровка аббревиатуры – беспилотный летательный аппарат.
- Квадрокоптер – это, грубо говоря, вертолет с четырьмя точками крепления воздушных винтов. Его можно назвать одновременно и дроном, и БПЛА, и радиоуправляемой моделью. Но если мультикоптер пилотируемый, использовать другие термины из заголовка статьи для его описания нельзя.
БПЛА и дрон
В современном мире термины “дрон” и “БПЛА” стали синонимами. Словом дрон можно назвать любой БПЛА (но не наоборот), но к радиоуправляемым летательным аппаратам он неприменим. История радиоуправляемых моделей началась тогда, когда БПЛА и дронов не было. Причем, от радиоуправляемых самолетов и вертолетов они отличаются кардинально.
“Дрон” – просто красивый термин, используемый в сводках новостей, и подразумеваться под ним может и БПЛА, и мультикоптер. Люди, чья деятельность или хобби связаны с БПЛА, сильно зажмуриваются, когда слышат слово “дрон”.
Чтобы написанная выше информация стала более понятной, нужно привести несколько примеров. Есть дроны, которые используются военными для обучения. Например, самолет самостоятельно взлетает и продолжает движение, пока команда, тренируемая поражению целей, не собьет его. Вместо самолета может использоваться корабль или подводная лодка.
Беспилотный автомобиль, разрабатываемый командой Google X, тоже можно назвать дроном. Термин “дрон” также применим в отношении роботов-саперов или роботов-разведчиков. Хотя разработчики подобной техники предпочитают название “робототехнический комплекс”.
На БПЛА устанавливаются сложные системы датчиков, комплексы автопилотирования, управления, наблюдения и контроля. Разведку или наблюдение с их помощью вести намного проще, чем с пилотируемых самолетов. При этом некоторые образцы БПЛА могут оснащаться вооружением.
Резюмируя: термины “дрон” и “БПЛА” сегодня применяются для описания одних и тех же аппаратов, но их не всегда можно использовать в качестве синонимов.

Дрон и квадрокоптер
Квадрокоптер (или квадролет) – это вертолет с четырьмя несущими роторами. Сегодня такие аппараты очень популярны из-за своих небольших габаритов и массы. В отличие от вертолетов той же грузоподъемностью на обучение управлению мультикоптером требуется намного меньше времени. Эта информация в равной мере относится и к пилотируемым аппаратам, и к беспилотным.
Конечно, специалисты заметят, что определение нужно дополнить, и сказать, что квадрокоптер представляет собой мультикоптер именно с четырьмя роторами. Мультикоптер же может оснащаться четырьмя, тремя, шестью, восемью и более моторами.
Для правильного употребления терминов важно знать, что квадролет и дрон – это не разные вещи. Дрон – робот, используемый в военных целях, спасательных операциях, исследований. Квадрокоптер – просто конструкция. В качестве аналогии можно привести родственные слова “автомобиль” и “седан”, или “самолет” и “истребитель”.

Квадрокоптер и мультикоптер
Мультикоптер – понятие менее конкретное, чем квадролет. Трикоптеры, гексакоптеры, октокоптеры – это тоже мультикоптеры. Единственная разница – в количестве воздушных винтов. В большинстве случаев в СМИ под мультикоптером подразумевают квадрокоптер.
Квадрокоптер поднимают в воздух четыре ротора – два вращаются в одну сторону, два – в другую. Винты, как правило, параллельны земле. Поток воздуха движется сверху вниз. Больше ничем квадрокоптер от дрона и БПЛА не отличается. Использование всех этих устройств одинаково: спасательные операции, фото и видеосъемка, научные и метеорологические исследования, разведка местности, мониторинг трафика.
Но чтобы определить, какой термин применим к конкретному аппарату, нужно задать вопросы: “Робот ли он? Кто управляет машиной: человек при помощи радиосвязи или программные алгоритмы?”
БПЛА может выполнять большинство действий самостоятельно: взлетать, садиться, перемещаться в воздухе. Оператору остается только следить за действиями аппарата. Управление на себя он берет только в непредвиденной ситуации, и управляет БПЛА удаленно. Говоря проще, БПЛА – машина, летающая самостоятельно. Если квадрокоптер удовлетворяет этому требованию, значит, он БПЛА.
На современные мультикоптеры установлено множество интеллектуальных систем. Благодаря им обучение пилотированию можно выполнять самостоятельно, и это не займет много времени. Главное – заранее прочитать инструкцию.
Если же отключить основные системы: движение при помощи навигации по GPS, телеметрию, передачу видео в реальном времени, – квадролет перестанет быть дроном или БПЛА и станет радиоуправляемой авиамоделью (но останется квадрокоптером), управлять которой на дальности, превышающей остроту зрения пилота, станет невозможно.
Поэтому принятый недавно закон об обязательной регистрации беспилотных воздушных судов массой более 0,25кг не имеет особого смысла. Однако под его действие попадают почти все любительские авиамодели и квадрокоптеры (ставшие в последнее время популярными).
Выводы
В современном мире термины “квадрокоптер”, “БПЛА” и “дрон” зачастую используются неправильно. Слова “дрон” и “беспилотник” определяют в первую очередь такое свойство аппаратов, как отсутствие экипажа на борту. Название же “квадрокоптер” указывает исключительно на конструкцию воздушного судна.

kopterinfo.ru
Из чего состоит квадрокоптер
Если вы решили собрать квадрокоптер своими руками, то вам необходимо знать из чего сегодня состоят эти мультироторные летающие машины.
И так, в первую очередь необходимо выбрать чертежи квадрокоптера подходящей модели – определиться с размером рамы, количеством моторов и их расположением, а также типом микропроцессорной системы контроллера полета квадрокоптера, которая будет определять набор датчиков, стабилизацию, отвечать за полет, а также обеспечивать дополнительные возможности аппарата. Выполнение всех этих задач зависит именно от правильного выбора платы.
Основательное продумывание деталей при выборе нужных технических характеристик квадрокоптера позволит в дальнейшем использовать его с максимальной эффективностью. Например, если аппарат приобретается для ведения аэрофотосъемки, то необходимо подобрать модель, способную удерживать в полете дополнительный вес аэрофотосъемочного комплекса.
К основным составляющим квадрокоптера относятся следующие детали.
• Рама

Рама является важной составной частью этого летательного аппарата, поскольку обеспечивает надлежащий внешний вид, правильное распределение узлов и нагрузок, а также простоту проведения ремонтных работ.
Раму можно изготовить в домашних условиях при помощи подручных средств, или же приобрести в готовом виде и только собрать. На сегодняшний день в свободной продаже имеются самые разные виды рам. В целом она выглядит как перпендикулярно пересекающиеся рейки с пластиковой крестовиной посредине для крепления платы. На сегодня самый распространенный вариант рамы предполагает использование алюминиевых профилей и крестовины из текстолита. Если есть желание потратить по больше денег, то используются карбоновые трубы вместо алюминия. У некоторых видов квадрокоптеров рамы имеют усиленную портативность – они могут складываться и удобно переноситься.
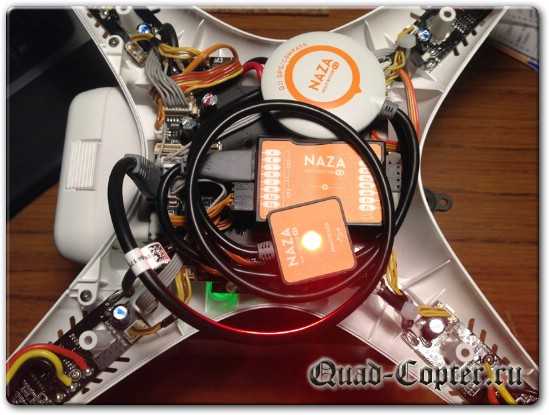
• Плата-контроллер

Как уже говорилось раньше, эта вещь является предопределяющим условием работы аппарата, отвечает за его функциональность и в целом летные возможности. Невзирая на свою компактность (около 5 см х 5 см), у нее есть все необходимое для работы самодельного квадрокоптера.
При креплении платы-контроллера следует помнить, что она должна размещаться на одной линии с линией вращения винтов. Кроме того очень важно уберечь плату от вибрации при соприкосновении с рамой. Чем выше виброизоляция, тем стабильнее летает квадрокоптер, особенно в автоматических режимах. Не стоит забывать также и о защитной крышке, которая убережет плату от повреждений и пыли. Последней очень много при взлете и посадке.
• Моторы

Жестких требований при выборе моторов не существует – можно выбрать любой вариант с вращением 800-1200 об/вольт для 3S аккумулятора. Мощность электродвигателя зависит от предполагаемых размеров и назначения квадрокоптера.
Если вы собираете квадрокоптер для Drone Racing, то на него ставятся небольшие моторы с оборотами в 2200-2300, смотрите статью 10 моторов для Drone Racing для более подробного ознакомления с этими электродвигателями.
• Электронный регулятор оборотов двигателя

При выборе этой детали следует неукоснительно соблюдать некоторые правила:
— Выбирать самое маленькое время отклика (от него зависит точность управления при полете).
— Провести калибровку регуляторов до первого полета. Избегать наличия функции защиты от помех в условиях быстрых осцилляций газа от платы-контроллера (использование такого регулятора может привлечь к отключению аппарата в полете).
— Обратить внимание на возможность перепрошивки регулятора специальной коптеровской прошивкой или взять Afro регулятор (они уже прошитые).
• Пропеллеры
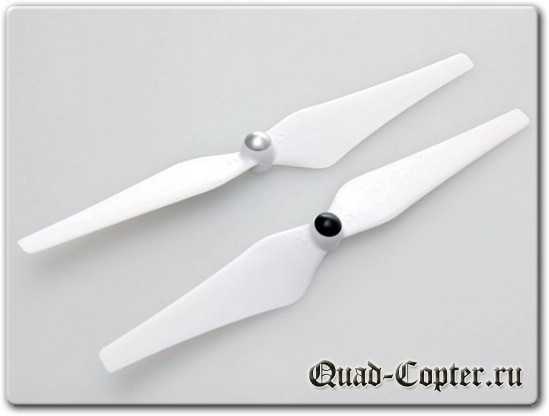
Для создания простейшего квадрокоптера понадобится два пропеллера, вращающихся влево, и два пропеллера вращающихся вправо. Таким образом, легко можно представить принцип их работы и возможность держать в воздухе устройство.
Пропеллеры должны быть узкими, с малым шагом винта. На практике устанавливают попарно пропеллеры разных цветов – таким образом можно будет идентифицировать переднюю и заднюю часть аппарата.
• Соединения
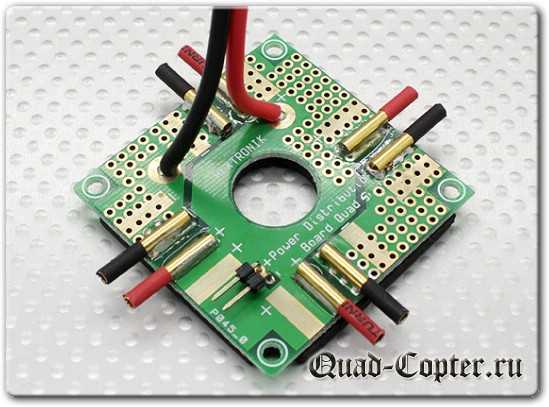
Ввиду наличия нескольких деталей, собранных на одной раме (пропеллеры и плата), становится проблемой правильно разложить и закрепить провода. Хорошим выходом из положения станет специальная плата из текстолита, которая имеет разведенные дрожки питания. Именно к ним можно припаять провода и подвести освещение.
О том, как соединить все это вместе смотрите статью — Соединение электроники квадрокоптера.
• Маркировка и навигация

Готовый квадрокоптер имеет правильную форму и четкую симметрию, потому нужно его каким-то образом маркировать, обозначив переднюю часть. Как писалось ранее, многие используют разноцветные пропеллеры или разноцветные светодиодные ленты.
Удобным способом маркировки может быть установка специального шара, а также правильное освещение — подсветку квадрокоптера, которая будет отчетливо видна в вечернее и ночное время. При свете дня переднюю часть можно легко различить и при помощи специальной раскраски.
• Разнообразные показатели
Для работы квадрокоптера понадобится довольно много датчиков, например, обязательно наличие трех гироскопов и акселерометров – это тот минимум, который обеспечит полет и отлаженное управление. Вместе с тем, на специализированных форумах можно найти множество советов о дополнительных возможностях и необходимых для этого датчиках. Также выбор будет зависеть и от задач, которые возложены на квадрокоптер.
Так, к примеру, для автоматического возврата при потере связи контроллер квадрокоптера должен иметь GPS антенну и преобразователь сигналов. Для четкого контроля высоты полета — бародатчик.
Стоит также отметить такую полезную деталь, как показатель заряда аккумулятора и датчики, позволяющие определить местонахождение аппарата в случае его потери. В качестве последнего может выступать установленный в квадрокоптер GPS треккер. В случае потери квадрокоптера с помощью него можно точку, где он приземлился при окончании батареи.
• Установка камеры

Принцип крепления камеры должен быть тщательно продуман. На малых моделях квадрокоптеров преимущество отдается обычной жесткой фиксации. Вместе с тем, в более сложных моделях камера крепится на подвесе, который гиростабилизирует съемочную камеру, а так же может управляться с пульта. Стабилизация видео делает съемку более качественной и резкие дерганья квадрокоптера не сказываются на записи видео.
В качестве камер для квадрокоптера отлично зарекомендовали себя экшенкамера SJ4000 и экшенкамера SJ4000.
Похожие статьи:
Видеоподборки про RC моделизм → Сборка гоночного Дрона на формованной раме и регуляторе 4в1
Аксессуары квадрокоптеров → Недорогой DC-DC конвертер
Видеоподборки про RC моделизм → Сборка бешеного квадрокоптера!! 3дюйма 5S Lipo! (I)
Квадрокоптер своими руками → Сборка миниквадрокоптера под FPV
Видеоподборки про RC моделизм → Хватит жечь дорогую электронику!!!
Квадрокоптер своими руками → Как соединить электронику квадрокоптера
Аксессуары квадрокоптеров → Регуляторы для самодельного квадрокоптера
Видеоподборки про RC моделизм → Делаем коннексолёт с регулятором 4-в-1
quad-copter.ru
квадрокоптер — Перевод на английский — примеры русский
На основании Вашего запроса эти примеры могут содержать грубую лексику.
На основании Вашего запроса эти примеры могут содержать разговорную лексику.
Не говоря о том, что вы сломали мой квадрокоптер.
Это квадрокоптер, но особенный — на привязи.
Я могу вам долго рассказывать о простоте использования, но лучший способ это доказать — взять второй квадрокоптер и запустить его.
Now, I can tell you that it’s easy a lot, but I think a really good way to prove that is to grab a second one and launch it.
Когда мы их соединяем, получаем квадрокоптер с высокими лётными качествами.
When you put them together, they behave like one high-performance quadrocopter.
Предложить пример
Другие результаты
В лаборатории Пенсильванского университета Виджай Кумар иего команда создают летающих квадрокоптеров — маленьких, быстрыхроботов, похожих на рой. Они чувствуют друг друга и сообщавыполняют команды по строительству, осмотру зон бедствия и многомудругому.
In his lab at Penn, Vijay Kumar and his team build flyingquadrotors, small, agile robots that swarm, sense each other, andform ad hoc teams — for construction, surveying disasters and farmore.
В данном случае жилет передаёт девять параметров с этого квадрокоптера: тангаж, рыскание, крен, положение и направление, и это улучшает способность пилота им управлять.
So in this case, the vest is streaming nine different measures from this quadcopter, so pitch and yaw and roll and orientation and heading, and that improves this pilot’s ability to fly it.
Некоторые из них могут быть вооружены HD камерами и способны отслеживать протестующих, или, как видно из этого отрывка видео, квадрикоптеры могут быть вооружены огнестрельным автоматическим оружием.
Some can be armed with HD cameras and do countersurveillance on protesters, or, as in this little bit of movie magic, quadcopters can be loaded with firearms and automatic weapons.
Успокойся, это наш квадрокоптер-шпион.
Это проект по созданию квадрокоптера.
context.reverso.net
Разница между квадрокоптером и дроном
В чём разница между дроном и квадрокоптером? Правильный ответ… ни в чём! Вопрос сам по себе поставлен не совсем корректно: фактически, перед нами два названия одной и той же вещи. Если ещё точнее, то любой квадрокоптер – это дрон, но не любой дрон – квадрокоптер.

Дроном называют любой беспилотный летательный аппарат. То есть, крутые беспилотники НАСА – это тоже дроны, просто другого класса. Ну а коптер – в нашем случае квадро – это вполне конкретный вид указанных беспилотников.
Особенности, характерные для квадро-
Отличается данная категория дронов наличием четырёх моторов и винтов. Бывают также коптеры с 2, 3, 6 и 8 винтами, но наибольшее распространение получили именно четырёхдвигательные модели. Связано это с тем, что такая конструкция обеспечивает оптимальное соотношение между ценой модели, её качеством, стабильностью поведения в воздухе, простотой управления, грузоподъёмностью и кучей других факторов.

Более маленькие дроны чувствительны к порывам ветра, более крупные – это уже профессиональный класс, предназначенный для выполнения серьёзных задач. Вот и получается, что нарицательным названием для всего класса коптеров в народе стал именно квадрокоптер.

В общем-то, именно модели этой категории и будут Вас интересовать, если Вы только начинаете свой путь в небеса с использованием беспилотников. Среди четырёхвинтовых красавцев есть много подходящих для новичков моделей, которые идеально Вам подойдут!
Также советуем прочитать уникальную и интересную статью, про квадрокоптеры. В этой статье детально разобран вопрос о том, как выбрать квадрокоптер.
gevis.ru
Как правильно пишется слово «квадрокоптер»
квадроко́птер
квадроко́птер, -а
Источник: Орфографический
академический ресурс «Академос» Института русского языка им. В.В. Виноградова РАН (словарная база
2020)
Делаем Карту слов лучше вместе

Привет! Меня зовут Лампобот, я компьютерная программа, которая помогает делать
Карту слов. Я отлично
умею считать, но пока плохо понимаю, как устроен ваш мир. Помоги мне разобраться!
Спасибо! Я стал чуточку лучше понимать мир эмоций.
Вопрос: дебелый — это что-то нейтральное, положительное или отрицательное?
Ассоциации к слову «квадрокоптер»
Синонимы к слову «квадрокоптер»
Предложения со словом «квадрокоптер»
- Принцип управления такой «бабочкой-такси» похож на управление квадрокоптером.
- Тётя, едва вышла из машины, тут же запустила квадрокоптер, так и что с разведкой у нас всё было на уровне.
- Мы засекли при помощи квадрокоптера в полукилометре от базы какой-то странный лагерь, в котором то ли семь человек, то ли семь зомби.
- (все предложения)
Значение слова «квадрокоптер»
-
1. авиац. беспилотный летательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях (Викисловарь)
Все значения слова КВАДРОКОПТЕР
Отправить комментарий
Дополнительно
Бесплатный переводчик онлайн с английского на русский
Хотите общаться в чатах с собеседниками со всего мира, понимать, о чем поет Билли Айлиш, читать английские сайты на русском? PROMT.One мгновенно переведет ваш текст с английского на русский и еще на 20+ языков.
Точный перевод с транскрипцией
С помощью PROMT.One наслаждайтесь точным переводом с английского на русский, а для слов и фраз смотрите английскую транскрипцию, произношение и варианты переводов с примерами употребления в разных контекстах. Бесплатный онлайн-переводчик PROMT.One — достойная альтернатива Google Translate и другим сервисам, предоставляющим перевод с английского на русский и с русского на английский.
Нужно больше языков?
PROMT.One бесплатно переводит онлайн с английского на азербайджанский, арабский, греческий, иврит, испанский, итальянский, казахский, китайский, корейский, немецкий, португальский, татарский, турецкий, туркменский, узбекский, украинский, финский, французский, эстонский и японский.
-
1
‘copter
Англо-русский словарь Мюллера > ‘copter
-
2
copter
Англо-русский словарь Мюллера > copter
-
3
copter
ˈkɔptə сокр. от helicopter ;
тж. ‘copter;
разг. вертолет, геликоптер( разговорное) вертолет, геликоптер
copter сокр. от helicopter
copter сокр. от helicopter helicopter: helicopter ав. вертолет, геликоптер ~ перевозить на вертолетеБольшой англо-русский и русско-английский словарь > copter
-
4
copter
Англо-русский синонимический словарь > copter
-
5
copter
[ˈkɔptə]
copter сокр. от helicopter copter сокр. от helicopter helicopter: helicopter ав. вертолет, геликоптер copter перевозить на вертолете
English-Russian short dictionary > copter
-
6
copter
English-Russian big medical dictionary > copter
-
7
copter
* * *
(n) вертолет; геликоптер
* * *
сокр. от helicopter ; тж. ‘copter; вертолет
* * *
(helicopter) [‘cop·ter || ‘kɑptər /»kɒptə]
вертолет, геликоптерНовый англо-русский словарь > copter
-
8
copter
[ʹkɒptə]
разг. (сокр. от helicopter)
вертолёт, геликоптер
НБАРС > copter
-
9
copter
Универсальный англо-русский словарь > copter
-
10
copter
[`kɔptə]
вертолет, геликоптер
Англо-русский большой универсальный переводческий словарь > copter
-
11
copter
English-Russian aviation meteorology dictionary > copter
-
12
copter
English-Russian military dictionary > copter
-
13
copter
[‘kɔptə]
вертолёт, геликоптер
Англо-русский современный словарь > copter
-
14
copter
The Americanisms. English-Russian dictionary. > copter
-
15
copter
n разг. вертолёт, геликоптер
English-Russian base dictionary > copter
-
16
copter
Авиасловарь > copter
-
17
copter
Englsh-Russian aviation and space dictionary > copter
-
18
copter lifts
Универсальный англо-русский словарь > copter lifts
-
19
copter pad
Универсальный англо-русский словарь > copter pad
-
20
copter ship
Универсальный англо-русский словарь > copter ship
Страницы
- Следующая →
- 1
- 2
- 3
- 4
См. также в других словарях:
-
copter — ⇒COPTER, verbe trans. Rare. Copter la cloche. ,,Faire sonner une cloche en la frappant seulement d un côté avec le battant (Ac. 1798 1932); cf. aussi BRENET, Dict. prat. et hist. mus., 1926, p. 106. Rem. On rencontre ds la docum. le subst. fém.… … Encyclopédie Universelle
-
copter — COPTER.v. a. Faire battre le battant de la cloche seulement d un côté. Copter la cloche. Copté, ée. participe … Dictionnaire de l’Académie Française 1798
-
copter — (helicopter) cop·ter || kÉ‘ptÉ™r / kÉ’ptÉ™ n. aircraft which flies using blades which rotate on a vertical axis … English contemporary dictionary
-
copter — Copter, a verbo {{t=g}}koptô,{{/t}} id est, percutio, pulso. Hoc fit insignis, hoc est, campanis templorum, quum non vtramque partem signi plectrum ferit: quod etiam Tinter, dicitur a tinnitu … Thresor de la langue françoyse
-
copter — ☆ copter [käp′tər ] n. short for HELICOPTER … English World dictionary
-
copter — (ko pté) v. a. Frapper une cloche d un seul côté avec le battant. SYNONYME SONNER, BOURDONNER, TINTER, COPTER. Sonner, c est mouvoir la cloche en sorte que le battant frappe des deux côtés ; bourdonner, c est mouvoir seulement le battant pour… … Dictionnaire de la Langue Française d’Émile Littré
-
copter — UK [ˈkɒptə(r)] / US [ˈkɑptər] noun [countable] Word forms copter : singular copter plural copters informal a helicopter … English dictionary
-
COPTER — v. a. Faire sonner une cloche en la frappant seulement d un côté avec le battant. Copter la cloche. COPTÉ, ÉE. participe … Dictionnaire de l’Academie Francaise, 7eme edition (1835)
-
COPTER — v. tr. Faire sonner une cloche en la frappant seulement d’un côté avec le battant. Copter la cloche … Dictionnaire de l’Academie Francaise, 8eme edition (1935)
-
copter — /kop teuhr/, n. Informal. helicopter. Also, copter. [1945 50; by shortening] * * * … Universalium
-
copter — 1. noun /ˈkɒptə,ˈkɑptɚ/ A helicopter. Shellie shouts something I cant quite make out over the racket of a passing police copter. 2. verb /ˈkɒptə,ˈkɑptɚ/ a) To helicopter: to transport by helicopter. b) To he … Wiktionary
Как правильно пишется слово «квадрокоптер»
квадроко́птер
квадроко́птер, -а
Источник: Орфографический
академический ресурс «Академос» Института русского языка им. В.В. Виноградова РАН (словарная база
2020)
Делаем Карту слов лучше вместе
Привет! Меня зовут Лампобот, я компьютерная программа, которая помогает делать
Карту слов. Я отлично
умею считать, но пока плохо понимаю, как устроен ваш мир. Помоги мне разобраться!
Спасибо! Я стал чуточку лучше понимать мир эмоций.
Вопрос: амелия — это что-то нейтральное, положительное или отрицательное?
Ассоциации к слову «квадрокоптер»
Синонимы к слову «квадрокоптер»
Предложения со словом «квадрокоптер»
- Принцип управления такой «бабочкой-такси» похож на управление квадрокоптером.
- Тётя, едва вышла из машины, тут же запустила квадрокоптер, так и что с разведкой у нас всё было на уровне.
- Мы засекли при помощи квадрокоптера в полукилометре от базы какой-то странный лагерь, в котором то ли семь человек, то ли семь зомби.
- (все предложения)
Значение слова «квадрокоптер»
-
1. авиац. беспилотный летательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях (Викисловарь)
Все значения слова КВАДРОКОПТЕР
Отправить комментарий
Дополнительно
Всего найдено: 15
Как правильно писать слово квадрокоптер или квадракоптер?
Ответ справочной службы русского языка
Верное написание: квадрокоптер.
Подскажите, пожалуйста: как правильно написать «квадрофестиваль» или «квадро-фестиваль»? Имеется в виду фестиваль, на котором будут проводиться соревнования квадроциклистов. Спасибо)
Ответ справочной службы русского языка
Следует писать слитно.
Нужны ли запятые в данном предложении: Подтверждать право управления необходимо и находясь за рулём квадроцикла.
Ответ справочной службы русского языка
Запятые не нужны. Не обособляется деепричастный оборот, если перед ним стоит усилительная частица и.
Подскажите, пожалуйста, нужна ли запятая перед _и:
Быстрый перекур, скупое «спасибо!» и снова в путь.
На удивление быстро вытягиваем квадроцикл и снова в путь.
Спасибо!
Ответ справочной службы русского языка
В обоих случаях перед и снова в путь лучше поставить тире.
Как правильно написать: квадрацикл или квадроцикл (речь идет о мототехнике)?
Ответ справочной службы русского языка
Правильно: квадроцикл.
Здравствуйте!
Как правильно «тетралогия фильмов» или «квадрология фильмов»? И почему?
Заранее спасибо!
Ответ справочной службы русского языка
Здесь используются греческие, а не латинские корни: монолог, диалог; дилогия, трилогия, тетралогия.
Подскажите, пожалуйста, как написать правильно слово квадрОцикл или квадрАцикл или?
Ответ справочной службы русского языка
Правильно: квадроцикл.
Как называют «комплект» из четыре и пяти фильмов: из двух — дилогия, из трех — трилогия, из четырех — квадрология (?), из пяти — квантология, квантилогия, квинтология, кванталогия??? Или по-другому?
Подскажите, пожалуйста! Срочно, для газеты!
Спасибо!!!
Ответ справочной службы русского языка
Вероятно, нужные слова — тетралогия, пенталогия.
Скажите, как правильно писать: квадрОцикл или квадрАцикл?
Спасибо.
Юлия.
Ответ справочной службы русского языка
См. ответ на вопрос № 240491.
Будьте добры, подскажите, как пишется слово квадра/оцикл. Сейчас каждый пишет, как ему больше нравится.
Ответ справочной службы русского языка
Правильно: квадроцикл.
Здравствуйте! Ни в одном словаре не смогли найти слово «квадрацикл». Или все-таки «квадрОцикл»? Как же писать правильно?
Ответ справочной службы русского языка
Правильно: квадроцикл и квадрицикл.
Первый автомобиль, созданный Генри Фордом, назывался квадрицикл (от англ. bicycle «велосипед»; название связано с тем, что квадрицикл передвигался на четырех велосипедных колесах).
Современные мотовездеходы имеют название квадроцикл.
Здравствуйте! Как правильно: квадрацикл или квадроцикл?
Спасибо.
Ответ справочной службы русского языка
Правильно: квадроцикл и квадрицикл.
Первый автомобиль, созданный Генри Фордом, назывался квадрицикл (от англ. bicycle «велосипед»; название связано с тем, что квадрицикл передвигался на четырех велосипедных колесах).
Современные мотовездеходы имеют название квадроцикл.
Здравствуйте! Подскажите, пожалуйста, как правильно писать: квадрацикл или квадроцикл? Спасибо.
Ответ справочной службы русского языка
См. в «Непростых словах».
Добрый день! Скажите, пожалуйста, как правильно пишется слово квадрАцикл или квадрОцикл? Это от слова квадра — четыре?
Спасибо.
Ответ справочной службы русского языка
См. http://spravka.gramota.ru/hardwords.html?no=262&_sf=40 [«Непростые слова»].
Как правильно пишется слово «квадра/о/цикл»?
Ответ справочной службы русского языка
Правильно: квадроцикл.
Первый автомобиль, созданный Генри Фордом, назывался квадрицикл (от англ. bicycle «велосипед»; название связано с тем, что квадрицикл передвигался на четырех велосипедных колесах). Современные мотовездеходы имеют название квадроцикл.
Еще одно родственное транспортное средство — квадрига. Это античная (древнегреческая, римская) колесница на двух колёсах, запряжённая четвёркой лошадей, расположенных в один ряд.
Разбор слова «квадрокоптер»: для переноса, на слоги, по составу
Объяснение правил деление (разбивки) слова «квадрокоптер» на слоги для переноса.
Онлайн словарь Soosle.ru поможет: фонетический и морфологический разобрать слово «квадрокоптер» по составу, правильно делить на слоги по провилам русского языка, выделить части слова, поставить ударение, укажет значение, синонимы, антонимы и сочетаемость к слову «квадрокоптер».
![]()
Содержимое:
- 1 Слоги в слове «квадрокоптер» деление на слоги
- 2 Как перенести слово «квадрокоптер»
- 3 Ударение в слове «квадрокоптер»
- 4 Фонетическая транскрипция слова «квадрокоптер»
- 5 Фонетический разбор слова «квадрокоптер» на буквы и звуки (Звуко-буквенный)
- 6 Предложения со словом «квадрокоптер»
- 7 Значение слова «квадрокоптер»
- 8 Как правильно пишется слово «квадрокоптер»
Слоги в слове «квадрокоптер» деление на слоги
Количество слогов: 4
По слогам: ква-дро-ко-птер
По правилам школьной программы слово «квадрокоптер» можно поделить на слоги разными способами. Допускается вариативность, то есть все варианты правильные. Например, такой:
квад-ро-коп-тер
По программе института слоги выделяются на основе восходящей звучности:
ква-дро-ко-птер
Ниже перечислены виды слогов и объяснено деление с учётом программы института и школ с углублённым изучением русского языка.
д примыкает к этому слогу, а не к предыдущему, так как не является сонорной (непарной звонкой согласной)
п примыкает к этому слогу, а не к предыдущему, так как не является сонорной (непарной звонкой согласной)
Как перенести слово «квадрокоптер»
ква—дрокоптер
квад—рокоптер
квадро—коптер
квадроко—птер
квадрокоп—тер
Ударение в слове «квадрокоптер»
квадроко́птер — ударение падает на 3-й слог
Фонетическая транскрипция слова «квадрокоптер»
[квадрак`опт’ир]
Фонетический разбор слова «квадрокоптер» на буквы и звуки (Звуко-буквенный)
| Буква | Звук | Характеристики звука | Цвет |
|---|---|---|---|
| к | [к] | согласный, глухой парный, твёрдый, шумный | к |
| в | [в] | согласный, звонкий парный, твёрдый, шумный | в |
| а | [а] | гласный, безударный | а |
| д | [д] | согласный, звонкий парный, твёрдый, шумный | д |
| р | [р] | согласный, звонкий непарный (сонорный), твёрдый | р |
| о | [а] | гласный, безударный | о |
| к | [к] | согласный, глухой парный, твёрдый, шумный | к |
| о | [`о] | гласный, ударный | о |
| п | [п] | согласный, глухой парный, твёрдый, шумный | п |
| т | [т’] | согласный, глухой парный, мягкий, шумный | т |
| е | [и] | гласный, безударный | е |
| р | [р] | согласный, звонкий непарный (сонорный), твёрдый | р |
Число букв и звуков:
На основе сделанного разбора делаем вывод, что в слове 12 букв и 12 звуков.
Буквы: 4 гласных буквы, 8 согласных букв.
Звуки: 4 гласных звука, 8 согласных звуков.
Предложения со словом «квадрокоптер»
Один из них запустил квадрокоптер с видеокамерой, которым часто пользовались для разведки.
Источник: И. Я. Негатин, Экспедитор, 2016.
И ещё там собирают и запускают квадрокоптеры!
Источник: Вольфганг Хекль, Новая жизнь старых вещей, 2013.
Значение слова «квадрокоптер»
1. авиац. беспилотный летательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях (Викисловарь)
Как правильно пишется слово «квадрокоптер»
Правописание слова «квадрокоптер»
Орфография слова «квадрокоптер»
Правильно слово пишется:
Нумерация букв в слове
Номера букв в слове «квадрокоптер» в прямом и обратном порядке:


A quadcopter or quadrotor[1] is a type of helicopter with four rotors.[2]
Although quadrotor helicopters and convertiplanes have long been flown experimentally, the configuration remained a curiosity until the arrival of the modern UAV or drone. The small size and low inertia of drones allows use of a particularly simple flight control system, which has greatly increased the practicality of the small quadrotor in this application.
Design principles
Each rotor produces both lift and torque about its center of rotation, as well as drag opposite to the vehicle’s direction of flight.
Quadcopters generally have two rotors spinning clockwise (CW) and two counterclockwise (CCW). Flight control is provided by independent variation of the speed and hence lift and torque of each rotor. Pitch and roll are controlled by varying the net centre of thrust, with yaw controlled by varying the net torque.[3]
Unlike conventional helicopters, quadcopters do not usually have cyclic pitch control, in which the angle of the blades varies dynamically as they turn around the rotor hub. In the early days of flight, quadcopters (then referred to either as ‘quadrotors’ or simply as ‘helicopters’) were seen as a possible solution to some of the persistent problems in vertical flight. Torque-induced control issues (as well as efficiency issues originating from the tail rotor, which generates no useful lift) can be eliminated by counter-rotation, and the relatively short blades are much easier to construct. A number of manned designs appeared in the 1920s and 1930s. These vehicles were among the first successful heavier-than-air vertical take off and landing (VTOL) vehicles.[4] However, early prototypes suffered from poor performance,[4] and latter prototypes required too much pilot work load, due to poor stability augmentation[5] and limited control authority.
Torque
If all four rotors are spinning at the same angular velocity, with two rotating clockwise and two counterclockwise, the net torque about the yaw axis is zero, which means there is no need for a tail rotor as on conventional helicopters. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).[6][7]
-

Schematic of reaction torques on each motor of a quadcopter aircraft, due to spinning rotors. Rotors 1 and 3 spin in one direction, while rotors 2 and 4 spin in the opposite direction, yielding opposing torques for control.
-

A quadrotor hovers or adjusts its altitude by applying equal thrust to all four rotors.
-
A quadrotor adjusts its yaw by applying more thrust to rotors rotating in one direction.
-
A quadrotor adjusts its pitch or roll by applying more thrust to one rotor (or two adjacent rotors) and less thrust to the diametrically opposite rotor.




Vortex ring state
All quadcopters are subject to normal rotorcraft aerodynamics, including the vortex ring state.[citation needed]
Mechanical structure
The main mechanical components are a fuselage or frame, the four rotors (either fixed-pitch or variable-pitch), and motors. For best performance and simplest control algorithms, the motors and propellers are equidistant.[8]
Coaxial rotors

In order to allow more power and stability at reduced weight, a quadcopter, like any other multirotor can employ a coaxial rotor configuration. In this case, each arm has two motors running in opposite directions (one facing up and one facing down).[citation needed]
Operations
Autonomous flight
The quadcopter configuration is relatively simple to program for autonomous flight. This has allowed experiments with complex swarming behaviour based on basic sensing of the adjacent drones.[citation needed]
Endurance
The longest flight time achieved by a battery-powered quadcopter was 2 hours, 31 minutes and 30 seconds. The record was set by Ferdinand Kickinger of Germany in 2016.[9] In setting the record, Kickinger used low discharge-rate, high-capacity lithium-ion batteries and stripped the airframe of non-essential weight to reduce power draw and extend endurance.[10]
Alternative power sources like hydrogen fuel cells and hybrid gas-electric generators have been used to dramatically extend endurance because of the increased energy density of both hydrogen and gasoline, respectively.[11]
History
Pioneers
The first heavier-than-air aerodyne to take off vertically was a four-rotor helicopter designed by Louis Breguet. It was tested only in tethered flight and to an altitude of a few feet. In 1908 it was reported as having flown ‘several times’, although details are sparse.[12]
Etienne Oehmichen experimented with rotorcraft designs in the 1920s. Among the designs he tried, his helicopter No.2 had four rotors and eight propellers, all driven by a single engine. The Oehmichen No.2 used a steel-tube frame, with two-bladed rotors at the ends of the four arms. The angle of these blades could be varied by warping. Five of the propellers, spinning in the horizontal plane, stabilized the machine laterally. Another propeller was mounted at the nose for steering. The remaining pair of propellers functioned as its forward propulsion. The aircraft exhibited a considerable degree of stability and increase in control-accuracy for its time, and made over a thousand test flights during the middle 1920s. By 1923 it was able to remain airborne for several minutes at a time, and on April 14, 1924 it established the first-ever FAI distance record for helicopters of 360 m (390 yd). It demonstrated the ability to complete a circular course[13] and later, it completed the first 1 kilometre (0.62 mi) closed-circuit flight by a rotorcraft.

Dr. George de Bothezat and Ivan Jerome developed the de Bothezat helicopter, with six-bladed rotors at the end of an X-shaped structure. Two small propellers with variable pitch were used for thrust and yaw control. The vehicle used collective pitch control. Built by the US Air Service, it made its first flight in October 1922. About 100 flights were made by the end of 1923. The highest it ever reached was about 5 m (16 ft 5 in). Although demonstrating feasibility, it was underpowered, unresponsive, mechanically complex and susceptible to reliability problems. Pilot workload was too high during hover to attempt lateral motion.
Postwar era
The Convertawings Model A Quadrotor was intended to be the prototype for a line of much larger civil and military helicopters. The design featured two engines driving four rotors through a system of v belts. No tail rotor was needed and control was obtained by varying the thrust between rotors.[14] Flown many times from 1956, this helicopter proved the quadrotor design and it was also the first four-rotor helicopter to demonstrate successful forward flight. Due to a lack of orders for commercial or military versions however, the project was terminated. Convertawings proposed a Model E that would have a maximum weight of 42,000 lb (19 t) with a payload of 10,900 lb (4.9 t) over 300 miles and at up to 173 mph (278 km/h). The Hanson Elastic Articulated (EA) bearingless rotor grew out of work done in the early 1960s at Lockheed California by Thomas F. Hanson, who had previously worked at Convertawings on the quadrotor’s rotor design and control system.[15][16]
The Gloster Crop Sprayer project of 1960 was an early example of a quadcopter drone. To be powered by a 105 hp Potez 4E air-cooled flat four-cylinder engine, its 20 gal payload was discharged through a 22 ft spray boom. Two operators carried homing beacons at opposite ends of the spray run, so that the quadcopter would always home in on a beacon and not overshoot. However, despite the much simplified design and operational requirements compared to a piloted machine, the parent company board refused to develop it and it remained a paper project.[17]

The Curtiss-Wright VZ-7 of 1958 was a VTOL aircraft designed by Curtiss-Wright in competition for the US Army Transport and Research Command «flying jeep». The VZ-7 was controlled by changing the thrust of each of the four ducted fan rotors.
The Piasecki PA-97 was a proposal for a large hybrid aircraft in which four helicopter fuselages were combined with a lighter-than-air airship in the 1980s.
Current developments
The Bell Boeing Quad TiltRotor concept takes the fixed quadcopter concept further by combining it with the tilt rotor concept for a proposed C-130 sized military transport.


Airbus is developing a battery-powered quadcopter to act as an urban air taxi, at first with a pilot but potentially autonomous in the future.[18]
Drones

FPV «whoop» drones can be as light as 30 grams
In the first decades of the 2000s, the quadcopter layout has become popular for small-scale unmanned aerial vehicles or drones. The need for aircraft with greater maneuverability and hovering ability has led to a rise in quadcopter research. The four-rotor design allows quadcopters to be relatively simple in design yet highly reliable and maneuverable. Research is continuing to increase the abilities of quadcopters by making advances in multi-craft communication, environment exploration, and maneuverability. If these developing qualities can be combined, quadcopters would be capable of advanced autonomous missions that are currently not possible with other vehicles.[19]
While small toy remote-controlled quadcopters were produced in Japan already in the early 1990s, the first one with a camera to be produced in significant quantities (Draganflyer Stabilized Aerial Video System, retrospectively also Draganflyer I, by Canadian start-up Draganfly) was not designed until 1999.[20][21]
Around 2005 to 2010, advances in electronics allowed the production of cheap lightweight flight controllers, accelerometers (IMU), global positioning system and cameras. This resulted in the quadcopter configuration becoming popular for small unmanned aerial vehicles. With their small size and maneuverability, these quadcopters can be flown indoors as well as outdoors.[1][22]
For small drones, quadcopters are cheaper and more durable than conventional helicopters due to their mechanical simplicity.[23] Their smaller blades are also advantageous because they possess less kinetic energy, reducing their ability to cause damage. For small-scale quadcopters, this makes the vehicles safer for close interaction. It is also possible to fit quadcopters with guards that enclose the rotors, further reducing the potential for damage.[2] However, as size increases, fixed propeller quadcopters develop disadvantages relative to conventional helicopters. Increasing blade size increases their momentum. This means that changes in blade speed take longer, which negatively impacts control. Helicopters do not experience this problem as increasing the size of the rotor disk does not significantly impact the ability to control blade pitch.
Due to their ease of construction and control, quadcopters are popular as amateur model aircraft projects.[24][25]
Criminal activity
Throughout the 21st century, there have been reported cases of quadcopter drones being used for criminal activity. Due to the construction of the Mexico–United States border wall, some drug cartels have resorted to the use of quadcopters to smuggle drugs.[26] However, quadcopter drones do not necessarily only smuggle drugs across the border, but there are also cases where weapons and other prohibited items are smuggled into prisons around the world.[27]
Quadcopter drone crime is also occurring in Europe. In August 2021, a police officer in the Czech Republic seized a quadcopter that was transporting a sachet of methamphetamine.[28]
See also
- AeroVelo Atlas (2013) human-powered helicopter
- Modular design
References
- ^ a b Hoffmann, G.M.; Rajnarayan, D.G.; Waslander, S.L.; Dostal, D.; Jang, J.S.; Tomlin, C.J. (November 2004). «The Stanford Testbed of Autonomous Rotorcraft for Multi Agent Control (STARMAC)». In the Proceedings of the 23rd Digital Avionics System Conference. Salt Lake City, UT. pp. 12.E.4/1–10. doi:10.1109/DASC.2004.1390847. ISBN 0-7803-8539-X.
- ^ a b Hoffman, G.; Huang, H.; Waslander, S.L.; Tomlin, C.J. (20–23 August 2007). «Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment» (PDF). In the Conference of the American Institute of Aeronautics and Astronautics. Hilton Head, South Carolina. Archived from the original (PDF) on 13 August 2010.
- ^ Stafford, Jesse (Spring 2014). «How a Quadcopter works | Clay Allen». University of Alaska, Fairbanks. Retrieved 20 January 2015.
- ^ a b Leishman, J.G. (2000). Principles of Helicopter Aerodynamics. New York, NY: Cambridge University Press. ISBN 9780521858601.
- ^ Anderson, S.B. (1997). «Historical Overview of V/STOL Aircraft Technology». NASA Technical Memorandum 81280.
- ^ «Quadrotor». Archived from the original on 27 December 2014. Retrieved 29 December 2014.
- ^ Andrew Hobden. «Quadcopters: Yaw». hoverbear.org. Retrieved 3 April 2017.
- ^ Uriah (13 April 2010). «Wyvern Quadrotor Helicopter». Retrieved 29 December 2014.
- ^ Ferdinand Kickinger (30 April 2016), 151min30s FPV with Copter, archived from the original on 22 December 2021, retrieved 26 August 2018
- ^ SPK Drones. How Quadcopters Fly.
- ^ McNabb, Miriam (February 2018). US Manufacturer Harris Aerial Launches New Hybrid Gas Electric Drone. Dronelife
- ^ Young, Warren R. (1982). The Helicopters. The Epic of Flight. Chicago: Time-Life Books. p. 28. ISBN 978-0-8094-3350-6.
- ^ «A Successful French Helicopter» Flight 24 January 1924 p47
- ^ «1956 — 1564 — Flight Archive». flightglobal.com. Retrieved 13 March 2015.
- ^ «Patent US3261407 — Helicopter rotor system». google.com. Retrieved 13 March 2015.
- ^ Inan, Esin; Kiris, Ahmet (20 January 2007). The Seventh International Conference on Vibration Problems ICOVP 2005. ISBN 9781402054013. Retrieved 13 March 2015.
- ^ James, Derek N.; Gloster Aircraft Since 1917, Putnam, 1971, p.413.
- ^ «Airbus on track to fly its electric aerial taxi in 2018».
- ^ «Illumin — The Quadrotor’s Coming of Age». Retrieved 29 December 2014.
- ^ Darack, Ed. «A Brief History of Quadrotors». Air & Space Magazine.
- ^ «Our Story | Draganfly». draganfly.com. Archived from the original on 12 December 2016. Retrieved 17 December 2021.
- ^ Büchi, Roland (2011). Fascination Quadrocopter. ISBN 978-3-8423-6731-9.
- ^ Pounds, P.; Mahony, R.; Corke, P. (December 2006). «Modelling and Control of a Quad-Rotor Robot» (PDF). In the Proceedings of the Australasian Conference on Robotics and Automation. Auckland, New Zealand.
- ^ «How-To: Quadrocopter based on Arduino». MAKE. Archived from the original on 11 December 2011. Retrieved 29 December 2014.
- ^ «FrontPage — UAVP-NG — The Open Source Next Generation Multicopter». Retrieved 29 December 2014.
- ^ «Drug smugglers turn to drones, advancing operations». DroneDJ. 21 December 2020. Retrieved 10 August 2021.
- ^ «Věznice | EAGLE.ONE». Eagle.One (in Czech). Retrieved 10 August 2021.
{{cite web}}: CS1 maint: url-status (link) - ^ Pokorný, Petr (10 August 2021). «Strážník v Doksech rukama chytil neregistrovaný dron, který přenášel pervitin». Českolipský deník (in Czech). Retrieved 10 August 2021.
External links
![]()
Wikimedia Commons has media related to Quadrotors.
- UPenn GRASP Laboratory Archived 2015-04-20 at the Wayback Machine
- ETH Zurich Research on Quadrotors
- FAA UAS Model Aircraft Operations safety guidelines
- TED Raffaello D’Andrea: The astounding athletic power of quadcopters
A quadcopter or quadrotor[1] is a type of helicopter with four rotors.[2]
Although quadrotor helicopters and convertiplanes have long been flown experimentally, the configuration remained a curiosity until the arrival of the modern UAV or drone. The small size and low inertia of drones allows use of a particularly simple flight control system, which has greatly increased the practicality of the small quadrotor in this application.
Design principles
Each rotor produces both lift and torque about its center of rotation, as well as drag opposite to the vehicle’s direction of flight.
Quadcopters generally have two rotors spinning clockwise (CW) and two counterclockwise (CCW). Flight control is provided by independent variation of the speed and hence lift and torque of each rotor. Pitch and roll are controlled by varying the net centre of thrust, with yaw controlled by varying the net torque.[3]
Unlike conventional helicopters, quadcopters do not usually have cyclic pitch control, in which the angle of the blades varies dynamically as they turn around the rotor hub. In the early days of flight, quadcopters (then referred to either as ‘quadrotors’ or simply as ‘helicopters’) were seen as a possible solution to some of the persistent problems in vertical flight. Torque-induced control issues (as well as efficiency issues originating from the tail rotor, which generates no useful lift) can be eliminated by counter-rotation, and the relatively short blades are much easier to construct. A number of manned designs appeared in the 1920s and 1930s. These vehicles were among the first successful heavier-than-air vertical take off and landing (VTOL) vehicles.[4] However, early prototypes suffered from poor performance,[4] and latter prototypes required too much pilot work load, due to poor stability augmentation[5] and limited control authority.
Torque
If all four rotors are spinning at the same angular velocity, with two rotating clockwise and two counterclockwise, the net torque about the yaw axis is zero, which means there is no need for a tail rotor as on conventional helicopters. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).[6][7]
-
Schematic of reaction torques on each motor of a quadcopter aircraft, due to spinning rotors. Rotors 1 and 3 spin in one direction, while rotors 2 and 4 spin in the opposite direction, yielding opposing torques for control.
-
A quadrotor hovers or adjusts its altitude by applying equal thrust to all four rotors.
-
A quadrotor adjusts its yaw by applying more thrust to rotors rotating in one direction.
-
A quadrotor adjusts its pitch or roll by applying more thrust to one rotor (or two adjacent rotors) and less thrust to the diametrically opposite rotor.
Vortex ring state
All quadcopters are subject to normal rotorcraft aerodynamics, including the vortex ring state.[citation needed]
Mechanical structure
The main mechanical components are a fuselage or frame, the four rotors (either fixed-pitch or variable-pitch), and motors. For best performance and simplest control algorithms, the motors and propellers are equidistant.[8]
Coaxial rotors
In order to allow more power and stability at reduced weight, a quadcopter, like any other multirotor can employ a coaxial rotor configuration. In this case, each arm has two motors running in opposite directions (one facing up and one facing down).[citation needed]
Operations
Autonomous flight
The quadcopter configuration is relatively simple to program for autonomous flight. This has allowed experiments with complex swarming behaviour based on basic sensing of the adjacent drones.[citation needed]
Endurance
The longest flight time achieved by a battery-powered quadcopter was 2 hours, 31 minutes and 30 seconds. The record was set by Ferdinand Kickinger of Germany in 2016.[9] In setting the record, Kickinger used low discharge-rate, high-capacity lithium-ion batteries and stripped the airframe of non-essential weight to reduce power draw and extend endurance.[10]
Alternative power sources like hydrogen fuel cells and hybrid gas-electric generators have been used to dramatically extend endurance because of the increased energy density of both hydrogen and gasoline, respectively.[11]
History
Pioneers
The first heavier-than-air aerodyne to take off vertically was a four-rotor helicopter designed by Louis Breguet. It was tested only in tethered flight and to an altitude of a few feet. In 1908 it was reported as having flown ‘several times’, although details are sparse.[12]
Etienne Oehmichen experimented with rotorcraft designs in the 1920s. Among the designs he tried, his helicopter No.2 had four rotors and eight propellers, all driven by a single engine. The Oehmichen No.2 used a steel-tube frame, with two-bladed rotors at the ends of the four arms. The angle of these blades could be varied by warping. Five of the propellers, spinning in the horizontal plane, stabilized the machine laterally. Another propeller was mounted at the nose for steering. The remaining pair of propellers functioned as its forward propulsion. The aircraft exhibited a considerable degree of stability and increase in control-accuracy for its time, and made over a thousand test flights during the middle 1920s. By 1923 it was able to remain airborne for several minutes at a time, and on April 14, 1924 it established the first-ever FAI distance record for helicopters of 360 m (390 yd). It demonstrated the ability to complete a circular course[13] and later, it completed the first 1 kilometre (0.62 mi) closed-circuit flight by a rotorcraft.
Dr. George de Bothezat and Ivan Jerome developed the de Bothezat helicopter, with six-bladed rotors at the end of an X-shaped structure. Two small propellers with variable pitch were used for thrust and yaw control. The vehicle used collective pitch control. Built by the US Air Service, it made its first flight in October 1922. About 100 flights were made by the end of 1923. The highest it ever reached was about 5 m (16 ft 5 in). Although demonstrating feasibility, it was underpowered, unresponsive, mechanically complex and susceptible to reliability problems. Pilot workload was too high during hover to attempt lateral motion.
Postwar era
The Convertawings Model A Quadrotor was intended to be the prototype for a line of much larger civil and military helicopters. The design featured two engines driving four rotors through a system of v belts. No tail rotor was needed and control was obtained by varying the thrust between rotors.[14] Flown many times from 1956, this helicopter proved the quadrotor design and it was also the first four-rotor helicopter to demonstrate successful forward flight. Due to a lack of orders for commercial or military versions however, the project was terminated. Convertawings proposed a Model E that would have a maximum weight of 42,000 lb (19 t) with a payload of 10,900 lb (4.9 t) over 300 miles and at up to 173 mph (278 km/h). The Hanson Elastic Articulated (EA) bearingless rotor grew out of work done in the early 1960s at Lockheed California by Thomas F. Hanson, who had previously worked at Convertawings on the quadrotor’s rotor design and control system.[15][16]
The Gloster Crop Sprayer project of 1960 was an early example of a quadcopter drone. To be powered by a 105 hp Potez 4E air-cooled flat four-cylinder engine, its 20 gal payload was discharged through a 22 ft spray boom. Two operators carried homing beacons at opposite ends of the spray run, so that the quadcopter would always home in on a beacon and not overshoot. However, despite the much simplified design and operational requirements compared to a piloted machine, the parent company board refused to develop it and it remained a paper project.[17]
The Curtiss-Wright VZ-7 of 1958 was a VTOL aircraft designed by Curtiss-Wright in competition for the US Army Transport and Research Command «flying jeep». The VZ-7 was controlled by changing the thrust of each of the four ducted fan rotors.
The Piasecki PA-97 was a proposal for a large hybrid aircraft in which four helicopter fuselages were combined with a lighter-than-air airship in the 1980s.
Current developments
The Bell Boeing Quad TiltRotor concept takes the fixed quadcopter concept further by combining it with the tilt rotor concept for a proposed C-130 sized military transport.
Airbus is developing a battery-powered quadcopter to act as an urban air taxi, at first with a pilot but potentially autonomous in the future.[18]
Drones
FPV «whoop» drones can be as light as 30 grams
In the first decades of the 2000s, the quadcopter layout has become popular for small-scale unmanned aerial vehicles or drones. The need for aircraft with greater maneuverability and hovering ability has led to a rise in quadcopter research. The four-rotor design allows quadcopters to be relatively simple in design yet highly reliable and maneuverable. Research is continuing to increase the abilities of quadcopters by making advances in multi-craft communication, environment exploration, and maneuverability. If these developing qualities can be combined, quadcopters would be capable of advanced autonomous missions that are currently not possible with other vehicles.[19]
While small toy remote-controlled quadcopters were produced in Japan already in the early 1990s, the first one with a camera to be produced in significant quantities (Draganflyer Stabilized Aerial Video System, retrospectively also Draganflyer I, by Canadian start-up Draganfly) was not designed until 1999.[20][21]
Around 2005 to 2010, advances in electronics allowed the production of cheap lightweight flight controllers, accelerometers (IMU), global positioning system and cameras. This resulted in the quadcopter configuration becoming popular for small unmanned aerial vehicles. With their small size and maneuverability, these quadcopters can be flown indoors as well as outdoors.[1][22]
For small drones, quadcopters are cheaper and more durable than conventional helicopters due to their mechanical simplicity.[23] Their smaller blades are also advantageous because they possess less kinetic energy, reducing their ability to cause damage. For small-scale quadcopters, this makes the vehicles safer for close interaction. It is also possible to fit quadcopters with guards that enclose the rotors, further reducing the potential for damage.[2] However, as size increases, fixed propeller quadcopters develop disadvantages relative to conventional helicopters. Increasing blade size increases their momentum. This means that changes in blade speed take longer, which negatively impacts control. Helicopters do not experience this problem as increasing the size of the rotor disk does not significantly impact the ability to control blade pitch.
Due to their ease of construction and control, quadcopters are popular as amateur model aircraft projects.[24][25]
Criminal activity
Throughout the 21st century, there have been reported cases of quadcopter drones being used for criminal activity. Due to the construction of the Mexico–United States border wall, some drug cartels have resorted to the use of quadcopters to smuggle drugs.[26] However, quadcopter drones do not necessarily only smuggle drugs across the border, but there are also cases where weapons and other prohibited items are smuggled into prisons around the world.[27]
Quadcopter drone crime is also occurring in Europe. In August 2021, a police officer in the Czech Republic seized a quadcopter that was transporting a sachet of methamphetamine.[28]
See also
- AeroVelo Atlas (2013) human-powered helicopter
- Modular design
References
- ^ a b Hoffmann, G.M.; Rajnarayan, D.G.; Waslander, S.L.; Dostal, D.; Jang, J.S.; Tomlin, C.J. (November 2004). «The Stanford Testbed of Autonomous Rotorcraft for Multi Agent Control (STARMAC)». In the Proceedings of the 23rd Digital Avionics System Conference. Salt Lake City, UT. pp. 12.E.4/1–10. doi:10.1109/DASC.2004.1390847. ISBN 0-7803-8539-X.
- ^ a b Hoffman, G.; Huang, H.; Waslander, S.L.; Tomlin, C.J. (20–23 August 2007). «Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment» (PDF). In the Conference of the American Institute of Aeronautics and Astronautics. Hilton Head, South Carolina. Archived from the original (PDF) on 13 August 2010.
- ^ Stafford, Jesse (Spring 2014). «How a Quadcopter works | Clay Allen». University of Alaska, Fairbanks. Retrieved 20 January 2015.
- ^ a b Leishman, J.G. (2000). Principles of Helicopter Aerodynamics. New York, NY: Cambridge University Press. ISBN 9780521858601.
- ^ Anderson, S.B. (1997). «Historical Overview of V/STOL Aircraft Technology». NASA Technical Memorandum 81280.
- ^ «Quadrotor». Archived from the original on 27 December 2014. Retrieved 29 December 2014.
- ^ Andrew Hobden. «Quadcopters: Yaw». hoverbear.org. Retrieved 3 April 2017.
- ^ Uriah (13 April 2010). «Wyvern Quadrotor Helicopter». Retrieved 29 December 2014.
- ^ Ferdinand Kickinger (30 April 2016), 151min30s FPV with Copter, archived from the original on 22 December 2021, retrieved 26 August 2018
- ^ SPK Drones. How Quadcopters Fly.
- ^ McNabb, Miriam (February 2018). US Manufacturer Harris Aerial Launches New Hybrid Gas Electric Drone. Dronelife
- ^ Young, Warren R. (1982). The Helicopters. The Epic of Flight. Chicago: Time-Life Books. p. 28. ISBN 978-0-8094-3350-6.
- ^ «A Successful French Helicopter» Flight 24 January 1924 p47
- ^ «1956 — 1564 — Flight Archive». flightglobal.com. Retrieved 13 March 2015.
- ^ «Patent US3261407 — Helicopter rotor system». google.com. Retrieved 13 March 2015.
- ^ Inan, Esin; Kiris, Ahmet (20 January 2007). The Seventh International Conference on Vibration Problems ICOVP 2005. ISBN 9781402054013. Retrieved 13 March 2015.
- ^ James, Derek N.; Gloster Aircraft Since 1917, Putnam, 1971, p.413.
- ^ «Airbus on track to fly its electric aerial taxi in 2018».
- ^ «Illumin — The Quadrotor’s Coming of Age». Retrieved 29 December 2014.
- ^ Darack, Ed. «A Brief History of Quadrotors». Air & Space Magazine.
- ^ «Our Story | Draganfly». draganfly.com. Archived from the original on 12 December 2016. Retrieved 17 December 2021.
- ^ Büchi, Roland (2011). Fascination Quadrocopter. ISBN 978-3-8423-6731-9.
- ^ Pounds, P.; Mahony, R.; Corke, P. (December 2006). «Modelling and Control of a Quad-Rotor Robot» (PDF). In the Proceedings of the Australasian Conference on Robotics and Automation. Auckland, New Zealand.
- ^ «How-To: Quadrocopter based on Arduino». MAKE. Archived from the original on 11 December 2011. Retrieved 29 December 2014.
- ^ «FrontPage — UAVP-NG — The Open Source Next Generation Multicopter». Retrieved 29 December 2014.
- ^ «Drug smugglers turn to drones, advancing operations». DroneDJ. 21 December 2020. Retrieved 10 August 2021.
- ^ «Věznice | EAGLE.ONE». Eagle.One (in Czech). Retrieved 10 August 2021.
{{cite web}}: CS1 maint: url-status (link) - ^ Pokorný, Petr (10 August 2021). «Strážník v Doksech rukama chytil neregistrovaný dron, který přenášel pervitin». Českolipský deník (in Czech). Retrieved 10 August 2021.
External links
![]()
Wikimedia Commons has media related to Quadrotors.
- UPenn GRASP Laboratory Archived 2015-04-20 at the Wayback Machine
- ETH Zurich Research on Quadrotors
- FAA UAS Model Aircraft Operations safety guidelines
- TED Raffaello D’Andrea: The astounding athletic power of quadcopters